Autonomous Robotics Systems
Research Alliance
byResearch Alliance
by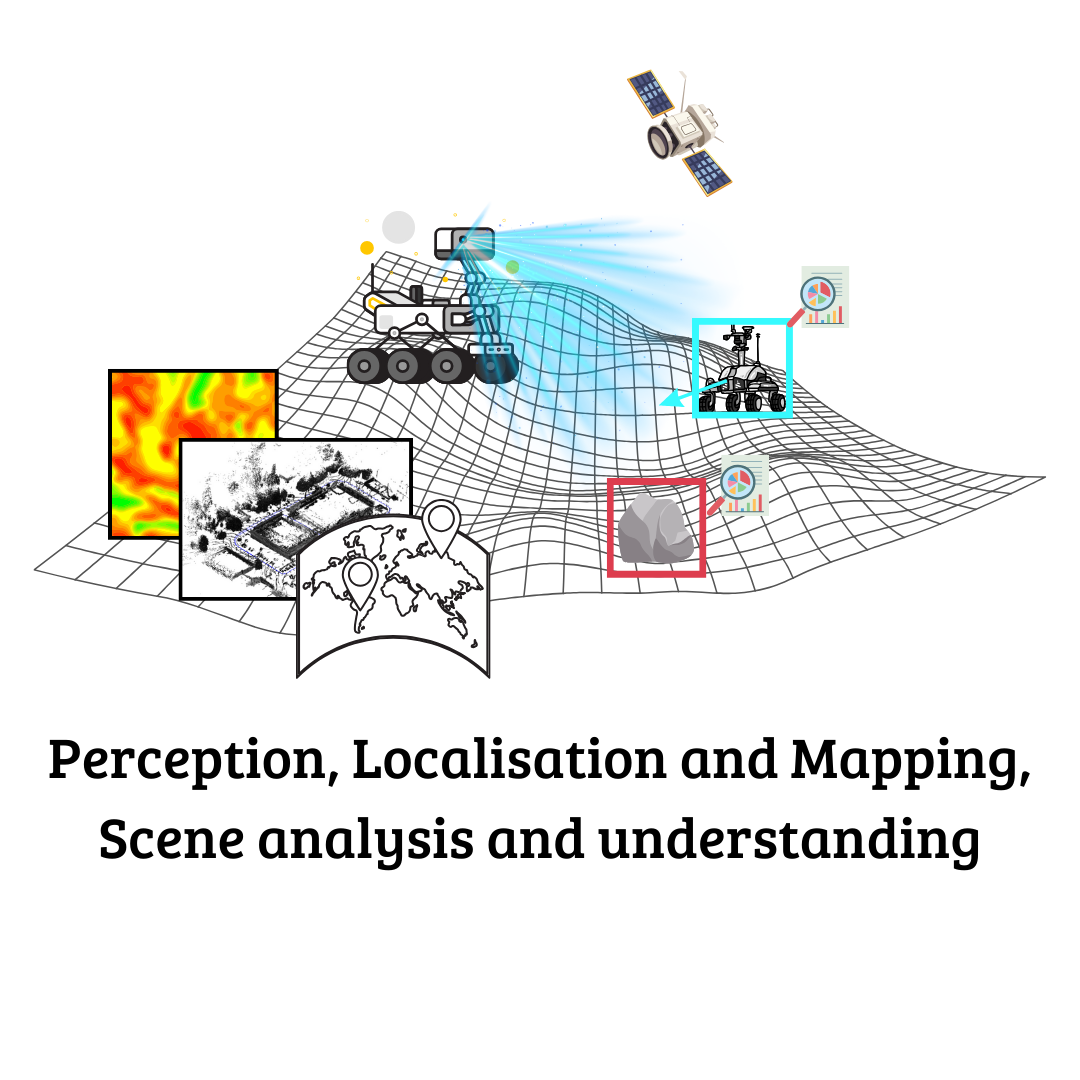
This topic concerns Perception systems applied to Robotics. It covers Multimodal Simultaneous Localization and Mapping, Multi-robot based Active SLAM, Scene understanding, 3D semantic mapping. It also cover image and signal processing for robust state estiamtion.

This topic focuses on embedded decision-making for autonomous systems. It consists in studying decision-making approaches and proactive architectures that have been designed for single-robot autonomous navigation decentralized multi-robot cooperation strategies to enhance systems efficiency and adaptability

This research domains covers guidance, navigation and control of highly maneuverable vehicles, tail-sitters and very flexible aircraft but also the use of IA technics for robotics control theory.

This research deals with methods to design human-machine(s) adaptive interaction control policies proposing flexible cooperation frameworks built upon the Mixed-Initiative Interaction paradigm. It also considered the estimation of the human's non-deterministic behavior.

Theme: Perception, Navigation, Decision, HMI
Period: 2022 / 2023 / 2025
Funding: Challenge Battle Lab
This project is a challenge proposed by the French Army, Battle Lab. It consist in a Multi-robot - Human collaboration for military operations (exploration, surveillance, target detection and tracking...)
Theme: Perception, Navigation, Decision
Period: 2024-2028
Funding: AID
This project studies Multi-robot based Active SLAM by taking into account various constraints like: localizability, mapping quality, mission timing, communication constraints between heterogeneous agents.
Theme: Perception, Navigation, Mapping
Period: 2023-2026
Funding: DGA
In this project, we design a Radar based SLAM in harsh environment. We aims at proposing a Radar only odometry in order to perform SAR imaging in the viscinity of the robot. The targetted application is traversability estimation.

Theme: Estimation, Navigation
Period: 2020-2026
Funding: DGA
This work focus on sure and robust navigation in different environmental contexts. The idea is to develop a robust and adaptative state estimator based on the detected navigation context (urban, deep urban, forest...)

Theme: Planning, partial observable stochastic games, reinforcement learning
Period: 2022-2026
Funding: ANR-DFG 2022-2026
This project aims to propose a framework based on game theory, reinforcement learning and automated planning to coordinate and supervise hetereogeneos teams of agents. We consider mixed teams (human-robots) that may be deployed for surveillance missions of protected environments (e.g. wildlife protection, forest pretection). The partial observable stochastic game, solved through multi-agent reinforcement learning would propose high-level strategy to each team, i.e a goal or a task, which in turn would plan a sequence of actions to achieve it.

Theme: humain-machine interaction, offline learning for planning
Period: 2022-2024
Funding: CASAC Chair
Mixed-Initiative Interaction : profile-based adaptive decision-making. This project aims to identify objective metrics for human-artificial agent (H-AA) collaboration evaluation. Performance evaluation is the predominant mean of assessing human-machine teams. However, there is another critical aspect in understanding the H-AA relationship: the degree of synchronization among team members’ activities, or quality of interaction. This is defined as fluency, which is not a static measure but a dynamic feature based on the progress of the task, environmental situations, and teammates’ states. In this context, we plan to identify objective metrics to be computed online (i.e. during collaboration) and used to adapt machine’s behavior according to the capabilities and expectations of human counterparts.

Theme: human-machine interaction, reinforcement learning, human agent action prediction
Period: 2022-2024
Funding: CASAC Chair
This project aims to study the context of collaboration between humans and artificial agents (AA), by proposing a framework where humans and artificial agents are perceived not only as partners but also as true teammates, with the ability to assume interchangeable roles and jointly accomplish tasks as part of a collaborative mission. HAICO assumes that the key to successful collaboration lies in mutual understanding and anticipation of intentions, what would facilitate tasks dispatching among agents over the achievement of common goals. The research questions raised by HAICO include : (i) whether eye-tracking data can be used to predict human action intentions, and how this implicit information can be used to learn smooth and effective policies for collaboration ; (ii) how explicit communication of action intention by AAs, using visual cues on the interface, can also improve human-perceived interaction fluidity and collaboration efficiency.
Theme: verifiable computation, zk-rollups, online and proactive multi-agent multi-task assignment
Period: 2021-2024
Funding: MITT doctoral school, AID
In this project regrouping two PhD thesis, we aim to propose blockchain inspired methods and tools for efficiently coordinate autonomous agents while provinding secure means for task dispatching among agents. With BLEND we expect to propose multi-agent multi-taks assignment algorithms that are less computationally costly than state-of-the-art approaches and compatible with verifiable computation (VC) tools. The use of VC would enable agents to check that tasks have been correctly assigned by the central server, and to counter cyber-physical attacks that a network of mobile agents could suffer in hostile environments, for instance a fake location to visit.

Theme: adaptive interaction, physiological computing, offline reinforcement learning, human-robot teaming
Period: 2020-2023
Funding: ANITI
This project aims to propose contributions to the field of human-robot adaptive interaction based on offline reinforcement learning (ORL) framework. In ORL the goal is to learn a decision policy offline based on a previously collected batch of experiences and without additional interaction in a data-efficient and risk-sensitive manner. HORIZON aims to provide methodological and algorithmic contributions for performing offline risk-sensitive policy selection and to apply these techniques to obtaining an adaptive interaction control policy in a human-robot collaborative scenario.

Theme:Blockchain technology, cryptography, computer science, IA
Period: 2017-2024
Funding: ---
Blockchain for aeronautical and space systems. Blockchain technology includes many scientific topics covered by research departments DCAS and DISC : computer science, IA, cryptography, distributed systems. Blockchains are foreseen to have many aerospace applications : drones, satellites, autonomous/embedded systems, air traffic management, ...
Theme: humain-machine interaction, (re)active brain-computer interfaces, partial observable Markov decision processes
Period: 2021-2024
Funding: AA Doctoral school
This project is an exploratory study on the use of partially observable Markov decision processes (POMDPs) as a general framework for brain-computer interfaces (BCIs). Real-world application of BCIs face a series of shortcomings, such as, the prevalence of false positives and the limitations imposed by fixed decoding times. It is expected POMDP model to provide the decision step translating brain activity to commands, reducing the average decoding time while preserving or improving the decoding of the underling classifier.

Theme: Perception, Navigation, Space Exploration
Period: 2021-2024
Funding: CNES - Occitanie Region
This project focus on Visual SLAM for lava tube exploration. The objective was to developped a light real-time Visual SLAM using bi-monocular fisheye and to build a direct traversability estimate for evaluating the navigation risk.
LiDAR/IMU/GNSS based 3D reconstruction
Active SLAM for safe area exploration
LiDAR based traversability estimation
COHOMA project: multi-robot mission with human robot interactions
Area automatic surveillance with a UAV fleet
On line path planning
Collaborating






